开yun体育官网入口登录苹果
College of Computer Science and Software Engineering, SZU

Adaptive Unfolding Total Variation Network for Low-Light Image Enhancement
International Conference on Computer Vision (ICCV)
Chuanjun Zheng, Daming Shi*, Wentian Shi
Shenzhen University
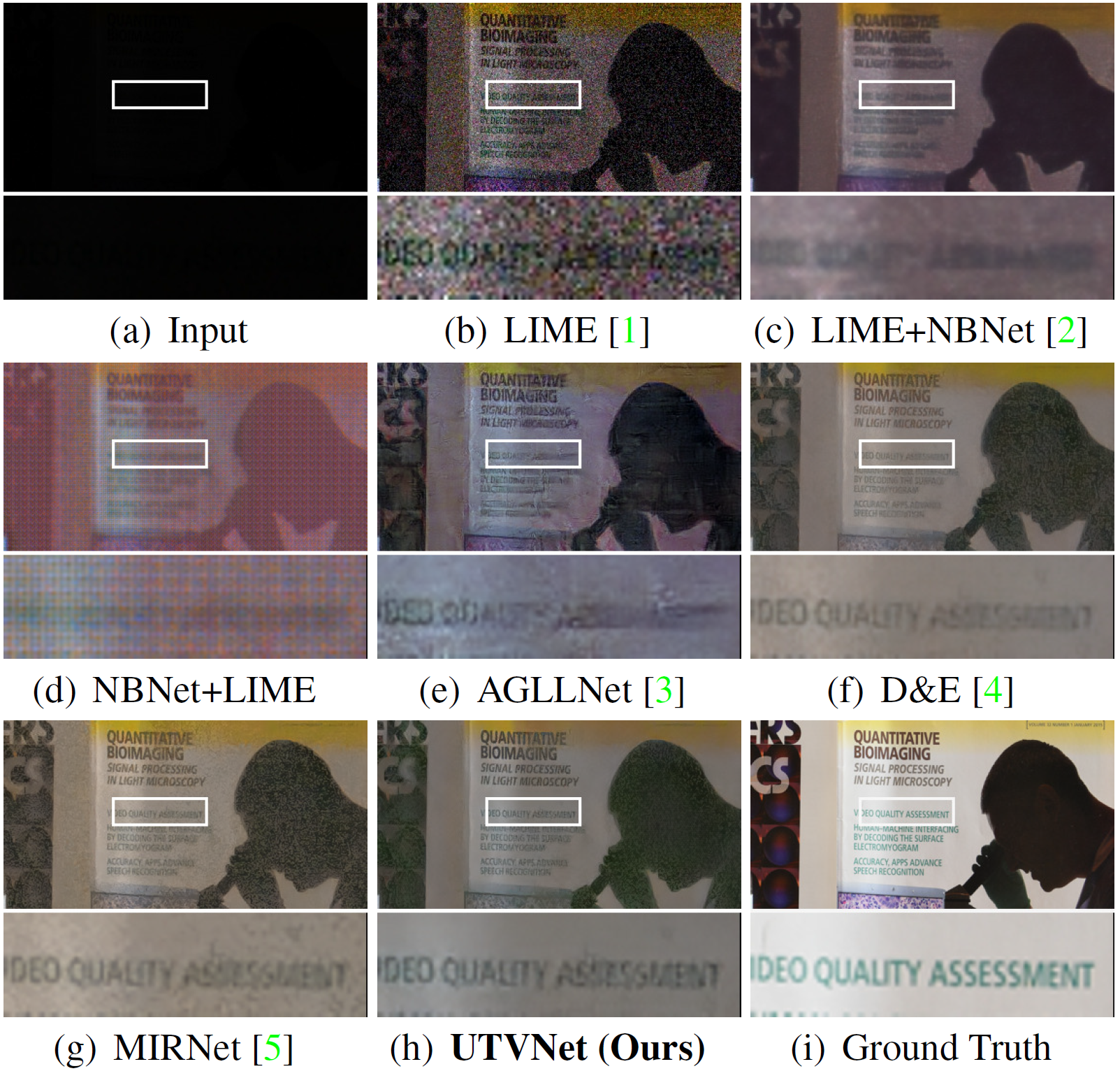
Figure 1. Performance in real captured low-light scene. (a) a sRGB image captured by a NikonD850 camera from ELD dataset [6]. (b-d) results of the luminance correction and denoising approaches.(f) and (g) are outputs of two recent methods without noise estima-tion. (e) the result of [3] trained on the synthetic low-light dataset to predict noise maps. (h) the result of proposed UTVNet. All images were cropped to make their details more visible.
Abstract
Real-world low-light images suffer from two main degradations, namely, inevitable noise and poor visibility. Since the noise exhibits different levels, its estimation has been implemented in recent works when enhancing low-light images from raw Bayer space. When it comes to sRGB color space, the noise estimation becomes more complicated due to the effect of the image processing pipeline. Nevertheless, most existing enhancing algorithms in sRGB space only focus on the low visibility problem or suppress the noise under a hypothetical noise level, leading them impractical due to the lack of robustness. To address this issue, we propose an adaptive unfolding total variation network (UTVNet), which approximates the noise level from the real sRGB low-light image by learning the balancing parameter in the model-based denoising method with total variation regularization. Meanwhile, we learn the noise level map by unrolling the corresponding minimization process for providing the inferences of smoothness and fidelity constraints. Guided by the noise level map, our UTVNet can recover finer details and is more capable to suppress noise in real captured low-light scenes. Extensive experiments on real-world low-light images clearly demonstrate the superior performance of UTVNet over state-of-the-art methods.

Figure 2. The proposed UTVNet consists of an unfolding TV module and an image restoration module. First, the given image y is fed into unfolding TV module to estimate noise level map M and generate noise-free smooth layer ys. Then, in image restoration module, ys is used to correct the luminance, and the noise suppression in detail layer yd is guided by the approximated noise level map M. We describe the details of the two modules in Section 3.

Figure 3. Evaluating the performance at different ISO levels (1600 vs. 3200) under exposure time (ET) 1/800s from the ELD dataset. M is the approximated average of noise level maps in all iterations by the proposed UTVNet. (Best viewed with zoom)
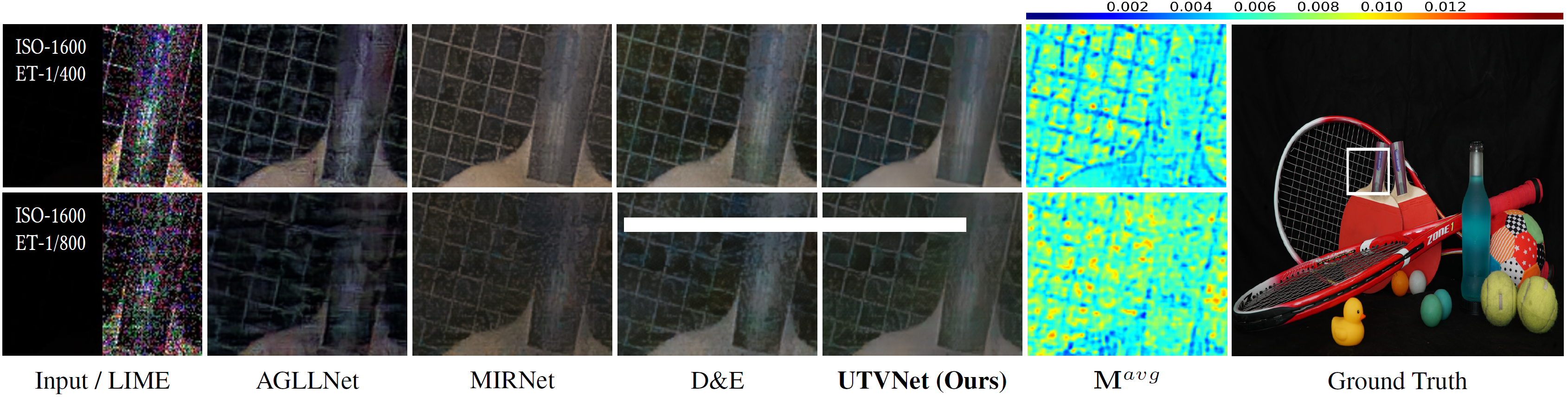
Figure 4. Evaluating the performance at different exposure times (1/400s vs. 1/800s) under ISO 1600 from the ELD dataset. M is the approximated average of noise level maps in all iterations by the proposed UTVNet. (Best viewed with zoom)
Acknowledgements
This work is supported by Ministry of Science and Technology China (MOST) Major Program on New Generation of Artificial Intelligence 2030 No. 2018AAA0102200. It is also supported by Natural Science Foundation China (NSFC) Major Project No. 61827814 and Shenzhen Science and Technology Innovation Commission (SZSTI) Project No. JCYJ20190808153619413.
Bibtex
@inproceedings{2021Adaptive,
title={Adaptive Unfolding Total Variation Network for Low-Light Image Enhancement},
author={ Zheng, C. and Shi, D. and Shi, W. },
year={2021},
}
Downloads